PARTNER - a semi-autonomous mobile service robot in a wireless network for biomedical applications
Francesco Giuffrida
1ISA-DTA srl, Piazza Montano 2, I-16151Genova
tel: +39-10-465117
fax: +39-10-414717
email: sand@dist.unige.it
Pietro G. Morasso
University of Genova - DIST, Via Opera Pia 13, I-16145, Genova, Italy
tel: + 39 10 3532749
fax: + 39 10 3532154
and
Center of Bioengineering, Hospital La Colletta, Via Giappone 3, I-16011 Arenzano, Italy
tel: +39 10 9134805
fax: +39 10 9134122
email: morasso@dist.unige.it
Renato Zaccaria
Center of Bioengineering, Hospital La Colletta, Via Giappone 3, I-16011 Arenzano, Italy
tel: +39 10 9134805
fax: +39 10 9134122
email: colletta@csita.unige.it
1. Summary
As a technological transfer from a TIDE project (MOVAID), a multi-functional mobile robot has been designed and brought to market applications in the biomedical field. It can carry out simple transportation missions either in an autonomus way, according to a schedule, or on demand, reacting to explicit requests coming from the local intranet via an infrared link.
| Top |
2. Introduction
PARTNER is a small multi-functional mobile robot which has been re-designed at DIST (Dept. of Informatics, Systems, Telecommunication) as a development of the MOVAID project, supported in the TIDE programme. The MOVAID prototype (the maquette of the system, produced by Domus Academy, is shown in Fig. 1-left) consisted of a mobile base, a manipulator, a vision system and a localisation system, to be coupled with specialised appliances in a protected environment for disabled users.
PARTNER shares with the MOVAID prototype the basic structure of the mobile base (Fig. 1-right) and the localisation system but is the result of a complete redesign at the architectural level, for integrating an open set of sensors, including a wireless infrared link with the local building-automation network.
Also the target application for PARTNER (a.k.a. snoopy-robot or dog-sized robot) is different: on one hand, PARTNER is simpler and quite less expensive than the MOVAID


Figure 1: Maquette of the MOVAID robot (left) and mobile base PARTNER robot (right).
system, because it does not include manipulation tasks but is limited essentially to transportation missions (scheduled or on demand) of things (food, drugs, blankets ...) or patients (as a sort of intelligent, autonomous wheelchair); on the other hand, the mission requirements are tougher, because the robot is requested to operate in larger, partially unknown environments (typically hospitals) among many people and other robots.
In general, the PARTNER system is aimed at the area of Civil Robotics, which is a novel challenging research field, with a large potential market and a significant social impact. This kind of mobile robot must be highly autonomous, able to carry out safe navigation in presence of unpredictable obstacles, humans, unforeseen situations, but, at the same time, it must co-operate with other robots and humans very closely. Consequently, it can play the role of a novel "partner" of a human operator in several high-tech scenarios, including biomedical applications.
As the result of a technological transfer project PARTNER is now a commercial product, produced and commercialised by ISA-DTA in Genova. A prototype hospital installation is planned for the end of 1998 in the Hospital La Colletta of Arenzano, in co-operation with the Center of Bioengineering of the Hospital.
| Top |
3. The mobile base
Partner is a medium-size, four-wheeled vehicle, equipped with an open set of sensors, connected to a general supervisor through several wireless channels, including a low-cost optical LAN which provides positioning information and information exchange. Its novelty is the integrated approach in which four critical components have been put together: i) system architecture, which models the robot operating system as a multi-agent (threads), real-time scheduler, including information exchange protocols and supervision processes, ii) perception, which is purposively based only on low-cost proximity sensors, iii) positioning, solved by a patented device, called DLPS, for indoor operation, which also supports communication, and iv) autonomous navigation, provided by an original "flat" model based on multi-agent technology operating on-board, and capable of solving a wide range of navigation problems, ranging from pure trajectory formation up to maze navigation.
The size of Partner (60x45x50 cm), together with a very small maximum curvature radius (40 cm) allows the utilisation within domestic, unstructured environments and small rooms. The payload is about 120 kg., allowing to carry on things and people. The salient characteristics are: a simple mechanics, a good accuracy of movement, the on-board Pentium-PC104 platform with a real-time POSIX-compliant operating system, a highly integrated hardware/software multi-level security system, and a simple man-machine interface. Moreover, the use within Partner of field bus EchelonÓ technology allows the integration of several types of sensors: ultrasonic and infrared proximity sensors, contact bumpers, pressure bumpers, DLPSÓ, CCD cameras.
| Top |
4. The System Architecture
The system architecture is organised as a set of concurrent light-weight processes within a real-time POSIX-compliant scheduler. Figure 2 illustrates its main components. The ellipses represent processes that operate concurrently and exchange information asynchronously. Double border ellipses represent interrupt driven processes that assure real-time response to incoming signals, either sensorial data, control data, or error reports. The rectangles represent shared analogical representations of the world the robot moves in. We consider these representations sub-symbolic in a wide sense. Arrows indicate the flow of information. In the architecture three processes connect the robot to the real world: the Perceiver, the Motion Controller, and the Positioning Component.
The Perceiver receives information from the ultrasonic sensors arranged around the robot's body. It is a real-time interrupt driven process that is activated whenever the sensors are ready to communicate the sensed data generating an interrupt. The data, in a raw format, are examined and interpreted basing on the system knowledge of the robot's position and orientation. It is then supplied to other processes in the architecture using an information exchange protocol. In the system the sensor operating frequency can be pre-set or dynamically altered by additional high-level reasoning levels. It is important to mention that, to obtain a robust robot behaviour, the navigation algorithm is not directly based on sensor data but on a dynamic world representation built fusing these values with previous readings and a priori knowledge.
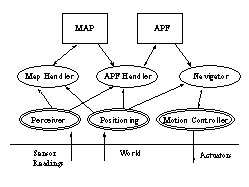
Fig. 2. System Architecture: ellipses are concurrent processes; double ellipses are interrupt-driven processes; rectangles are shared analogical representations.
The Motion Controller is connected to the robot's actuators. It is responsible of the robot's movement in the environment, receiving commands under the form of speed and jog information supplied by the navigator. It is, analogously to the perceiver, an interrupt driven process that deals with the low-level control requirements.
The Positioning process fuses data from odometry and from active beacons appropriately placed in the environment the robot moves in. The process provides the absolute position and orientation of the robot.
The perceiver, the motion controller and the positioning component have another important role in the architecture because they provide a virtual interface to the real world. This increases the portability of the system to different type of robots and sensor hardware for which only these three processes need to be adapted. In addition it allows to easily implement a world simulator, redirecting the virtual sensors and actuators to a simulated model of the environment. The other processes in the architecture operate concurrently to build and update the world representation while implementing the appropriate navigation strategy. They differ from the previously mentioned process because they are substantially machine independent and because they work under a slightly more relaxed time constraint. The navigator is always active to alter the motion parameters on the basis of a local description of the environment. The processes operate on two main shared representations of the environment the robot moves in: the map which is a statistical description (referred to the environment, or "eco-centred" ) of the free and occupied space built on the basis of sensorial information, and the artificial potential field (apf) for motion control and currently used by the navigation algorithm. The apf represents, in contrast with the map, an analogical robot-centred description of the environment. Whenever new sensor data is produced, the map handler and the apf handler processes are activated to update the internal representations. All the processes in the architecture fall in two categories: interrupt driven and message driven. The first type connect the robot to the real world or to an alternative simulated model. They are driven by software or hardware interrupts because they are related to perception and action that require extremely small response times. The second type operate if certain conditions are fulfilled. These conditions are based on a general message broadcasting protocol.
| Top |
5. Man-machine interaction
The man-machine interaction is provided by simple infrared remote control devices, which use the same backbone of the localisation system (DLPSÓ - distributed local positioning system). According to DLPSÓ, each Partner machine has a rotating modulated laser which interacts with a set of active beacons distributed in the environment, in average 3 of them for each room. The beacons are controlled by low-cost communications microprocessors of the EchelonÓ family which are linked to an ethernet-based LAN or, more simply, a LAN based on modulated power lines. Localisation is carried out by performing a triangulation between the robot and the beacons currently in view. The same link is also used for transmitting mission commands from the user (medic/paramedic personnel or individual patients) to the Partner or also for allowing different Partners to exchange information and co-operate during task execution.
| Top |
Literature:
Frixione, M., Piaggio, M., Vercelli, G. and R. Zaccaria (1995) A cognitive hybrid model for autonomous navigation, AIIA Conference Proceedings, Lecture Notes in Artificial Intelligence, Springer-Verlag.
Giuffrida, F., Morasso, P., Vercelli, G. and R. Zaccaria (1995) DLPS - Distributed Local Positioning System for multi-robot environments. Proceedings of the Seventh International Conference on Advanced Robotics, vol I, pp. 377-382.
Piaggio, M., Sgorbissa, A. and R. Zaccaria (1996), A distributed architecture for autonomous robots, IEEE Proceedings of the International Conference in Engineering of Complex Computer Systems, Montreal, Canada.
Piaggio, M., Sgorbissa, A., Vercelli, G. and R. Zaccaria (1996), Fusion of sensor data in a dynamic representation, IEEE Proceedings of the 1st Euromicro Workshop on Advance Mobile Robots, Kaiserslautern, Germany.
| Top | | TIDE 98 Papers |