Establishing initial user requirements for PAM-AID: a mobility and support device to assist frail and elderly visually impaired persons
Anne-Marie O'Neill and Helen Petri
Sensory Disabilities Research Unit
University of Hertfordshire
Hatfield AL10 9AB U.K.
tel: +44 1707 284 629, fax: +44 1707 285059
email: a.m.o-neill@herts.ac.uk
h.l.petrie@herts.ac.uk
Gerard Lacey O'Reilly Institute
Trinity College
Dublin 2, Ireland
tel: +353 1 608 1535, fax: +353 1 677 2204
email:gerard.lacey@cs.tcd.ie
Nikos Katevas Zenon S.A., Kanari 5
Glyka Nera Attikis
GR-15344 Athens, Greece
tel: +30 1 60 41 582, fax: +30 1 60 41 051
email:nkat@leon.nrcps.ariadne-t.gr
Mari-Anne Karlson and Pontus Engelbrektsson
Department of Consumer Technology
Chalmers University of Technology
S-412 96 Göteborg Sweden
tel: +46 31 772 1104, fax: +46 31 772 1111
email:mak@mot.chalmers.se
Blaíthín Gallagher, Heather Hunter and Domitilla Zoldan
National Council for the Blind of Ireland
Whitworth Rd., Dublin 9, Ireland
tel: +353 1 830733, fax: +353 1 830 7787, email: blaithin@ncbi.iol.ie
1. Summary
The PAM-AID project aims to build an intelligent, indoor mobility aid for frail and elderly visually impaired people which will provide both physical and navigational support for walking. The objective is to allow users to retain their personal autonomy and also to take independent exercise. The project involves ongoing user involvement and evaluations of the developing product. The project has five distinct phases: (1) user requirements elicitation, (2) rapid prototyping, (3) construction of a demonstrator, (4) user and carer training, and (5) system validation. This paper reports on the first two phases of the project.
| Top |
2. Introduction
Frail and elderly visually impaired people who are unable to use a cane or a guide dog have considerable problems in maintaining independent mobility. This often leads to unnecessary dependence upon carers and a rapid decline in physical well-being. The Personal Adaptive Mobility Aid (PAM-AID) will provide the physical support of a walking frame or rollator, coupled with navigational assistance provided by sensor and control systems, as well as auditory output. The sensor and control systems allow detection of certain features in the environment and will guide users accordingly. For example, the aid will detect obstacles and safely guide users around them, it will follow wall-lines in corridors and detect potential hazards such as downward stairs. A variety of options for the interface to PAM-AID are being considered in the project. For example, as the device detects and guides, users will obtain information about their environment via speech or warning sounds and proprioceptive force feedback. Furthermore, to meet varying user needs, the aid can be operated in three ways: voice input, switches/buttons on handles or via moveable handles.
| Top |
3. User requirements study
As an initial step toward developing an aid which will meet the requirements of the target user groups, a study of user requirements was undertaken with potential users and their carers in three countries (Ireland, Sweden and the U.K.). Face to face interviews were conducted with 38 potential users of PAM-AID of whom 18 were partially sighted, 13 were blind and 7 were sighted. Participants' ages ranged from 68 to 92 years, giving a mean age of 81.8 years. Interviews were also conducted with 14 carers and rehabilitation officers who work with frail and elderly visually impaired people, in order to draw upon their expertise of the user group and to gain further insight into the user requirements for the PAM-AID device.
Each interview session began with a detailed description of the potential functions of PAM-AID and discussions of various scenaria for its use by the target user groups. Topics covered in the interviews included:
(a) current mobility/support aid use (for potential users only); To establish current levels of mobility of participants and which aids they currently use both inside and outside the home. Participants were asked about the advantages and disadvantages of their current mobility aids.
(b) requirements for: input options (voice and switch input, and different possible configurations of switches); output options (speech and sound output); physical design and structure of the aid (handles, seat, alarm, forearm rests, shopping basket); and possible modes of operation (automatic versus guiding); and
(c) demographic information (age, vision status, place of residence, other disabilities).
The interview schedule included questions which required participants to rate their opinions on 5-point Likert scales (1 = very low through to 5 = very high) and open-ended questions to facilitate discussion.
The user requirements study yielded a wealth of information regarding potential users' current levels of mobility and their needs and preferences regarding the PAM-AID device. The mean ratings elicited during the user requirements interview were analysed using a univariate analysis of variance (ANOVA) and post-hoc Newman-Keuls tests to establish differences by country, gender, vision status and age.
Overall, participants gave a moderate mean rating for use of voice input (mean rating = 3.27, standard deviation = 1.58) with many of them stating that they were worried that they might feel conspicuous and embarrassed in public (e.g. in a hospital). It transpired that participants would be more willing to use voice input in more private settings (e.g. in their own home) (mean = 3.69, s = 1.57) than in more public settings (mean = 3.34, s = 1.80). Switch input (finger and thumb operated) received fairly high ratings (for finger-operated switches: mean = 3.78, s = 1.27; for thumb-operated switches: mean = 3.48, s = 1.34), but there were significant differences between the ratings given by participants across the three counties (for finger-operated switches: F 2,34 = 4.40, p = .02; mean rating for Irish participants = 3.00, s = 1.25; mean rating for Swedish participants = 3.64, s = 1.29; mean rating for U.K. participants = 4.38, s = 1.02; for thumb-operated switches: F 2,30 = 5.43, p = .02; mean rating for Irish participants = 2.90, s = 1.37; mean rating for Swedish participants = 2.71, s = 1.11; mean rating for U.K. participants = 4.19, s = 1.11). This suggests that some country-specific tailoring of the PAM-AID may be necessary.
Participants thought that speech output information would be moderately useful (mean = 3.57, s= 1.66), with sighted participants rating this information as being more useful than congenitally visually impaired participants (for sighted participants: mean = 4.14, s = 1.57; for congenitally visually impaired participants: mean = 1.67, s = 1.15). One explanation for this result is that congenitally visually impaired participants would find speech output less useful than the sound feedback that they already receive from their surrounding environment. Another possibility is that sighted participants would like the security that speech information gives them, particularly if they expect their sight to deteriorate with age.
A similar result was found with participants' ratings for the usefulness of sound output. Blind participants were not sure about this form of output, reporting only that they may use a walking aid with sound output. However, sighted participants stated that they definitely would use a walking aid with sound output. This was also supported by the significant difference between blind and sighted participants when asked if they thought information via sounds would be useful (F 2, 27 = 3.28, p = .05). Blind participants stated that they would find the information moderately useful (mean = 3.00, s = 1.76) whereas sighted participants rated this information as very useful (mean = 5.00, s = 0.0). Again, this is interesting as we would have expected blind participants to rate the use of sound output as being more useful than sighted participants. As suggested above, sound output in general from a walking aid may be regarded as not being very useful to blind participants because it may be a distractor to, or not as useful as, other environmental sounds
Significant cross-country differences were also found regarding the use of sound output (F 2, 27 = 5.98, p = .007). Participants from the U.K. were most positive about the usefulness of sound output (mean rating = 4.23, standard deviation = 1.30) and Irish participants were the least enthusiastic (mean = 2.33, s = 1.32) with the Swedish participants falling in between (mean = 3.25, s = 1.16). Hence, it may be necessary to provide a choice of different input and output methods for those with different levels of vision and across different cultures. Clearly there are also individual differences in preferences for input and output, and these user requirements should only be taken as indicating the likely default options from which to start individual tailoring of a PAM-AID device for different user groups.
| Top |
4. Development of a rapid prototype
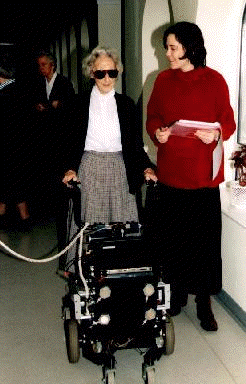
Figure 1: PAM-AID rapid prototype being used by an Irish participant
A rapid prototype has been constructed by fitting motors to the rear wheels of a standard rollator, mounting a user interface on the handles. A bumper skirt was also constructed to detect collisions, and sensors were attached which feed sonar range data on obstacles to a onboard laptop computer. Voice and sound feedback to the user are possible via a speaker system. The user interface can be configured to meet different user needs. The options available are: moveable handles, push button switches, joystick control or voice control. The control software enables obstacle detection and avoidance. Currently the prototype of PAM-AID is being designed [1]. Issues being addressed include: obstacle avoidance, new kinematic configuration of mobile robots, sensor integration, and the human machine interface.
| Top |
5. Conclusions
The set of user requirements generated in this study, have provided a guide for the development of the first prototype of the PAM-AID device. This prototype will be subject to a number of intensive evaluations by potential users in the U.K., Ireland and Sweden. The results from each evaluation will contribute to the continuing development of the device, so that the requirements of users are met.
| Top |
6. Acknowledgements
The PAM-AID Project (DE 3210) is supported by the Telematics Applications Programme for the Integration of Disabled and Elderly People (TIDE) of the Commission of the European Union (DG XIII). We would like to thank all our project partners and all the people who participated in the user requirements studies for their assistance.
[1] Lacey, G. and Dawson-Howe, K. (1997). Evaluation of Robot Mobility Aid for the Elderly Blind. Symposium on Intelligent Robotic Systems (SIRS'97). Stockholm, Sweden.
| Top | | TIDE 98 Papers |