「ノーマライゼーション 障害者の福祉」 2004年2月号
食事支援ロボット「マイスプーン」
石井純夫
1 食事支援ロボットとは
手に障害があるため自分で食事ができない人のために、セコム(株)では、2002年5月、日本初の食事支援ロボットの発売を開始した。これは、利用者が自分一人で食事をすることを支援する操縦型のロボットである。
利用者のジョイスティック操作に従って、ロボットのアームが食卓上の食物を口元へ運ぶ作業を行う。操作の原理は、ゲームセンターのクレーンゲームに近く、初めての人でも親しみを持って使っていただいている。本ロボットにより、好きな時間に自分のペースで食事をすることが可能になる。本ロボットには、その機能をよく表す「マイスプーン」という名前を付けた。
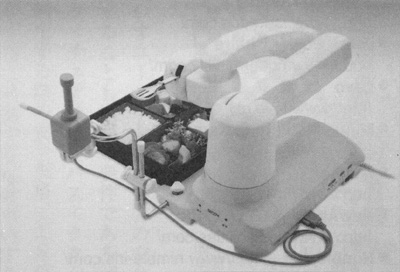
図1 マイスプーン外観
2 システム構成
システムは、本体(ハンド・アーム)、ジョイスティック、専用食事トレイ、コップスタンドから構成される。テーブル上の食事トレイの右側に、本体(ハンド・アーム)が設置され、ハンドには専用スプーンとフォークを装着する。ジョイスティックは使用者の身体状況に適した位置に設置される。たとえば、頭部で操作する場合は、あご付近にレバーを設置する。
なお、本ロボットは家庭内での使用を考慮し、次のとおり、小型・軽量なシステムとなっている。
- 本体質量:6kg
- 本体寸法:横 28cm×奥行 37cm×高さ25cm
- 消費電力:30W
3 ハンド
ハンドは、装着したスプーンとフォークにより食物を挟み込む。これは、料理を取り分けるときに使うトング(大きなピンセット)を、基本デザインとしている。これにより確実に食物をつかめるだけでなく、搬送中でもこぼしにくい。
しかし、スプーンとフォークでつかんだままでは、食べにくい。そこで摂取時は、スプーンが口に触れるとフォークがスライド後退し、スプーンだけで食物を差し出すシステムとした。この口の接触は、タッチセンサーとしての機能も持つスプーンで検知している。
また、スプーンとフォークも、このロボットのために福祉用具のデザイナーと共同で専用にデザインしたものである。このため、食物をこぼしにくく、口に取り込みやすい形状になっている。
図2 ハンド(食物をつかんだ状態)

4 食べられる食物
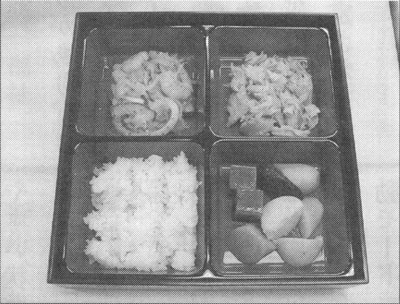
マイスプーンは、さまざまな食物を扱うことができる。一口サイズ(約2cm角)に切って盛り付ければ、豚カツ・卵焼きのような固形物から、ご飯、豆腐のような柔らかいものまで対応できる。また、ご飯は粘りがあるためスプーンで押し固める操作、ゼリーはスプーンで切り取ってつかむ操作が必要である。慣れるにしたがって、より快適に扱えるようになっていく。
麺類は、長いままだと搬送中に引きずってしまうため、あらかじめ短めに切っておくか、丸めておくようお願いしている。
また、お茶などの飲み物は、付属のコップスタンドからストローで摂取する。フレキシブルチューブで自由に適切な位置に固定できる。
なお、ヒアリングによると食事時間は約20分であり、適切な時間内で食事を終えていると思われる。
図3 食事の盛り付け例
5 操作装置
ジョイスティックは、標準タイプと強化タイプの2種類あり、使用者の身体症状に合わせて選定する。標準ジョイスティックは、握りが小さく、レバーの操作力が軽い。よってあごや指先での操作に向いている。強化ジョイスティックは、握りが大きくがっちりしており、レバーの操作力が大きい。そのため足などで操作する人が用いる。これらのジョイスティックのほかに自動モード用ボタンがある。これはジョイスティック操作が難しい人が、ボタン押下だけで操作する場合に用いる(自動モードについては後述する)。
6 操作方法
次に、操作方法を手順に従って説明する。
【操作手順1:区画の指示】
専用食事トレイには仕切りがあり、区画が4つある。一方、ジョイスティックは「前・後・左・右」の4つの入力が可能であり、それぞれ容器の区画に対応している。食べたい食物のある区画に対応した方向へレバーを倒すと、アームが動作し、ハンドは指定された区画に移動する。
【操作手順2:ハンド位置の調整】
ハンドは、前・後・右の3方向に調整可能である。レバーを倒している間、ハンドはその方向へ移動し続ける。スプーンがつかめる位置まで、ハンドを調整する。
【操作手順3:「つかむ」指示】
レバー「左」が、「つかむ」の指示に割り当てられている。「つかむ」を入力する、すなわちレバーを左に倒すと、スプーンとフォークが閉じて食物をつかみ、その後アームが自動的に食物を口元まで運ぶ。
【操作手順4:食べる】
口元までハンドが到達したら、スプーンに口を付ける。するとフォークが後ろへ下がる。これで食物が口に取りやすい状態になるので、使用者は食べることができる。
この操作を繰り返すことにより、食事を行う。
なお前記の操作は、3つある操作モードのうちの「手動モード」である。ほかに、容器の区画を指示するだけで区画内の食物を順番に搬送する「半自動モード」、ボタンを押下するたびに自動的に4つの区画を移動し順番に食物を搬送する「自動モード」がある。
7 ご利用者の条件
ご利用いただくための身体条件は、手が不自由であるため食事介護を受けている人の中で、次の条件等を満たす人である。
- 嚥下(えんか)(飲み込み)が正常にできる
- 頭部を自由に動かすことができる(そして口元に差し出された食物を摂取できる)
- ジョイスティック等の機器の操作ができる
具体的には、頸髄損傷、脳性マヒ、筋ジストロフィー、慢性関節リウマチ等の人である。
8 設置と準備
福祉機器は、準備や後片付けを担う介助者にとっても快適でなくては受け入れてもらえない。その点にも十分な配慮を施した。
まず、食卓に簡単に設置できるよう小型・軽量とした。準備は、専用食事トレイに一口サイズに食物を盛り付け、スプーン・フォークをセットし、電源スイッチを入れるのみである。あとはご利用者の操作で食事が進む。スプーン・フォークは、ワンタッチで着脱可能であり、通常のスプーンと同様に洗浄できる。
ジョイスティックは、ご利用者に合わせてセットすれば、それ以降はそのままご利用いただける。
また、スプーンが食物を口元に差し出す位置も、ジョイスティック操作により位置を指定・記憶させることができる。スプーンの口元での位置は食べやすさに大きな影響を与えるので、ジョイスティック操作で簡単に調整できる点は、この装置の利便性に寄与している。
9 安全対策
本ロボットは人と接触しながら作業を行うものであり、十分な安全性を確保する必要がある。そこで、次の対策を施した。
第一に、口元で食物を差し出すスプーン位置は、あらかじめ設定した口の直前の位置で停止する。
第二に、暴走監視回路を組み込んでいるので、システムは高い信頼性を確保している。
第三に、食物の搬送中に、人の手などが触れて、スプーンのセンサーが接触を検知すると、アームが動作を停止する。
第四に、アーム動作用のモーターは、パワーを必要最小限とし、人と接触しても軽く触った程度となる機構とした。
これらにより、人との接触に対して高い安全性を保有している。もちろん電気用品や食器としての安全性も確保している。
10 本ロボットへの評価
これまで、障害者個人や病院、福祉施設などにご購入いただいているが、代表的なユーザーの声を紹介する。
「自分で食事ができるのがいい」
「家族に介助をいつもしてもらっているので、家族は後にご飯を食べるが、マイスプーンを使うと家族と向き合って話を楽しみながら食事ができるのでよい」
「お菓子やお酒のつまみを、介助者に頼むのは気兼ねするが、これを使えばいつでも食べられるので便利だ」
また、販売価格も、安価な電動車いす程度(38万円から)に抑え、さらにご利用しやすいようにレンタル(5年契約、6100円/月から)も用意している。
11 食事支援ロボットの課題と展望
さらにマイスプーンを使いやすいものにするために、食物の自動認識を研究中である。これが実現できれば「ご飯」を指示するだけで、自動的にご飯をつかみ、食べることも可能になるだろう。これにより、操作手順が簡素化し、より快適に利用できるようになる。
近年、このようなセンシング機能の発達は目覚しいものがあるが、セコム(株)でもセキュリティー分野において高い技術を保有している。このような技術を元にロボットの機能の向上をめざしていく。
これからも、さらに食事支援ロボット「マイスプーン」の改良を進め、人々のよき「道具」として生活を支えていきたい。
*本装置は、(財)テクノエイド協会より助成を受けて研究開発された(平成12年度~平成13年度)。
(いしいすみお セコム(株)開発センターメディカル1チーム)
【参考文献】
(1)黒岩貞枝 他:『食事支援ロボットの臨床応用』、第37回日本作業療法学会誌、22―特別、208、2003
(2)石井純夫 他:『食事支援ロボットの事例紹介』、第18回日本リハ工学カンファレンス講演論文集、253、2003