「ノーマライゼーション 障害者の福祉」 2013年4月号
生活支援ロボット開発の現状・課題・展望
大川弥生
1 はじめに
ロボットというと、鉄腕アトムやドラえもんを思い浮かべる読者も多いでしょう。また最近では、イベント会場やテレビでASIMO(本田技研)などの2足歩行ロボットや、AIBO(ソニー)などのエンターテイメントロボットを見る機会も増えてきました。
ですが現実に活躍しているロボットは、主に産業分野での産業用ロボットです。その研究開発は、1960年代に米国で始まり、「ロボット元年」といわれる1980年以降、国内各社が開発に参画し、自動車などの生産ラインに広く導入されたのです。
これらの産業用ロボットの目的は、主に単純な繰り返し作業や悪環境下での作業からの作業者の解放であり、「労働者の作業を代行する」ものです。
一方で、生活支援ロボットは介護・福祉・家事・安心・安全などの生活分野で「人の生活を支援する」ものです。
本誌の読者の多くである障害当事者や支援者の方々は生活支援ロボットを期待されていると思います。しかし同時に、それら当事者や支援者の方々には、ロボット開発・研究のパートナーとしての役割も求められています。
ここで大事なことは“実用化”ということです。生活支援ロボットの開発研究は盛んに行われており、本特集でも具体例が紹介されています。しかし残念なことに、生活機能低下者への生活支援ロボットの実用化はまだ途上といわなければならないのです。
2 開発研究中の生活支援ロボット1)
生活支援ロボッ卜の開発・研究は、産業用ロボットより遅れて始まりました。1977年に機械技術研究所(現産業技術総合研究所)で開発が開始された「盲導犬ロボット」は、その先駆的な研究といえます。その後、高齢者の生活支援や介護者の負担軽減、介護者不足を補うこと等を目的として開発がなされるようになってきました。
(1)車いすロボット
障害物回避、壁に沿った走行、ドアの通り抜けなどが自動的に行える車いすの研究が、1990年代に始まり、最初は赤外線センサ、超音波センサ、レーザレンジファインダなどの外界の状態を把握するセンサを搭載していました。2000年以降になるとGPS(全地球測位システム)やRFID(ICチップを利用した非接触認証技術)などの技術を利用して、自分の位置を認識しながら自動運転するシステムが開発されています。
たとえばTAO-Aicle(アイシン精機、富士通、産総研の共同開発)は、GPS、RFID、赤外線センサを利用し、RFIDを埋め込んだ経路上で障害物を避けながら目的地に向かって自動運転することができ、2005年の愛知万博では半年間で3万人以上の来場者が試乗し、一種の大規模実証実験になりました。
電動車いすの性能向上の研究としては、全方向に移動可能な車いすが多数提案されています。しかし機構が複雑になり、また耐荷重や段差乗り上げ能力などの面で問題が残っています。
(2)歩行支援ロボット
視覚障害者に対する歩行支援として、歩行ガイドロボット「ひとみ」(山梨大学の森ら)は、GPSやカメラにより、自己位置、障害物などを認識し、前もって示された経路に沿って人を誘導することができます。またガイドケイン(ミシガン大学)は、超音波センサにより障害物や段差を検出し、障害物を左右に回避しながら誘導します。
下肢の運動機能障害がある人の歩行支援を目指したロボット技術の応用の研究も盛んです。これには歩行訓練を主たる目的としたものも多くみられます。またトレッドウォーカー2(早稲田大学・藤江研究室)は、使用者がロボット上に乗って、そのトレッドミル上で歩行すると、その歩行速度を数倍にして移動する移動ロボットです。
最近は、使用者の身体に装着して用いるウェアラブル(装着型)ロボットの応用として、使用者の下肢に装着して歩行を支緩するロボットの研究が盛んで、本特集でも紹介されています。
(3)上肢動作支援ロボット
上肢の運動機能障害のある人への支援ロボットの研究開発も多くあります。商品化(2002年)されたものとして「マイスプーン」(セコム)があり、これは食事動作という「活動」(生活行為)の支援に絞って開発されたものです。
(4)移乗支援ロボット
ベッドと車いす間の移乗として、人を持ち上げて移乗を支援するものや、ベッドの一部を分離し車いすの形状にすることで移乗自体の必要性をなくすものが開発されてきています。
また車いすと便器がそれぞれ自動的に移動して入れ替わることにより、立ち上がって座るだけでトイレに移乗できるシステムも考えられました。
(5)動物型ロボット
ロボット・セラピーを目的としてアザラシの形をしたメンタル・コミットメント・ロボット「パロ」は、2004年に販売が開始されました。
(6)インターフェイスの研究
機器を操作するための技術(インターフェース)に関する研究も多く行われています。たとえば、指示(コマンド)を音声情報、頭部の動き、筋電信号、EOG(眼電図)を利用して行うものや、カメラや磁気センサにより顔向きや視線方向を計測して機器を操作する方法などで、さらに近年では、脳波を使うBMIの技術も研究されています。
(7)実用化における問題点
ここで実用化との関係で注目したいことがあります。2003年に販売された車いすロボットiBOT(米インデペンデンステクノロジー社)は、ジャイロセンサを搭載して、二輪で立ち上がることが可能な上、20センチの段差の昇降が可能でした。この車いすはFDA(米食品医薬品局)により医療器具としての認可を受けました。しかし2008年には製造中止になったのです。これには、アメリカの医療保険制度であるメディケアに認められなかったことが大きかったと言われています2)。すなわち価格が高いために購入者が少なく、製造が継続されなくなったのです。
3 実用的なロボット開発のための共通認識の必要性
このように多くの研究開発がなされていますが、実はこれらのほとんどは、ある一定の模擬的条件下で機能が確認できているだけで、実生活での実用性は確認されていない、つまり、本当の実用化には到達していないのです。
筆者は、この点に問題意識をもつロボット分野の研究者とともに「人に役立つ」ロボット開発のあるべき方向を求めて、ICF(国際生活機能分類)の立場からの研究を行なっています。
筆者とこの分野との関わりは、十数年前にロボット分野の研究者からのお誘いで会議に出たり、リハビリテーション医療や介護の現場の1日の流れを見ていただきながら議論したりしたことに始まります。そのたびに痛感したのは、同じことを見ていても、「認識の共有」が難しいことでした。さらに目標、目的の共有には一層の困難があったのです。
それは簡単にいえば、「一対一」である「個別臨床的対応」と「一対多」である「機器研究開発」との考え方・姿勢の根本的な違いです。どちらか一方が正しいのではなく、二者が両立できるような視点の確立が必要なのです。
その後、この関係の研究者の方々とご一緒に検討する機会も増えてきて、「認識の共有」の難しさを打開して生活機能向上に向けたロボット研究・開発のストラテジーを確立する方向や方策も見えてきたように感じています。
4 生活機能向上に向けたロボット研究・開発のストラテジー
(1)「生活機能」向上の観点
これまでの研究から見えてきたことは、人の「生活」を支援する工学分野の研究・開発においては、明確な「生活機能(functioning)」向上の観点に立つことが求められるということです。
(2)工学と「臨床現場」の「足し算」ではなく
従来は、工学研究者と医療・介護・福祉・リハビリテーション医療などのいわゆる「現場の人」や当事者とが協力しさえすれば(いわば「足し算」で)、この問題は解決できると考えられてきたようです。しかし、確固たるストラテジーがないために、実は非常に大きなロスが生じているのではと危惧されます。
そうではなく、これまでの生活機能研究の成果を生かし、それを生活支援のための研究・開発のストラテジー(技術体系・研究体系・組織)としてさらに深めることが必要です。
(3)「一対多」の生活機能向上のストラテジーの必要
それは、筆者自身が長年携わってきた生活機能向上の観点からの臨床実践・研究を基礎にしつつ、しかし個別臨床(「一対一」の生活機能向上)とは違った、ロボット研究・開発(「一対多」の生活機能向上)の観点から工学研究者と適切なチームを組むことのできる、全く新たな観点からの考え方です。
5 ICF(国際生活機能分類)
このようなストラテジーの確立のためには「生きることの全体像」の理解・把握の基盤であるICF(国際生活機能分類)の理論的枠組みが効果的です。人が「生きること」は限りなく複雑であり、認識枠組みを明確にして常に意識的にそれに準拠しない限り、「複雑さ」の波の中に呑まれてしまうことになりかねません。この点でICFの枠組みが有効なのです。
(1)ICFとは
ICFとは2001年に世界保健機構(WHO)総会で承認された、人が「生きること」(生活機能)についての国際分類です3)~6)。これは、同じWHOの「国際疾病分類(ICD)」、すなわち百年以上の歴史をもつ病気・外傷についての分類と並ぶ「健康」についての重要な指標です.
(2)生活機能モデルが大事
ICFには、「生活機能モデル」という理論的な側面と「分類(分類項目を整理したもの)」という実用的な側面との2つの面があります。現在の問題に関して重要なのは「生活機能モデル」と、その活用法の正しい理解です。
(3)生活機能モデル:「生きることの全体像」
ICFは、一言でいえば『「生きることの全体像」についての「共通言語」』です。
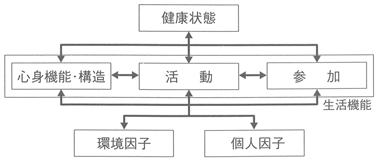
まず「生きることの全体像」とは、図に示すような「生活機能モデル」として、「生活機能」を構造的に、それに影響する3つの要因の影響を含めて捉えるものです。なお、ロボット等の支援機器は「環境因子」に含まれます。
図 生活機能モデル(ICF・WHO)
 (拡大図・テキスト)
(拡大図・テキスト)
参加:仕事、家庭内役割、地域社会参加 等
活動:歩行、家事、仕事などの生活行為
心身機能・構造:心と体のはたらき、体の部分 等
健康状態:病気、ケガ、妊娠、高齢、ストレス 等
環境因子:建物、福祉用具、介護者、社会制度 等
個人因子:年齢、性、ライフスタイル、価値観 等
(4)「共通言語」とは
ICFは、「生きる」うえでの問題・困難(生活機能低下、障害)をもつ個々の人の状況の正しい理解と、問題解決(生活機能向上)に向けた働きかけ方について、多数の関係者の間(異なる専門家の間、当事者と専門家の間、など)の共通の認識をつくるための枠組みとして役立ちます。それを比喩的に「共通言語」といいます。
支援機器の開発研究の過程では、このICFの枠組みに立つことで問題・課題そして効果を、各要素間の相互の影響を含めて整理することが重要です。そして、それによって「人」が生きること、そして特定の工学的支援の『「人」への影響』を客観的に捉えることができます。さらにこの枠組みは、どのような支援を開発すべきかという「ニーズ」の把握にも、また開発途中・適用開始後の評価にも役立つのです。
(5)評価に必要な技術・能力
効果の評価は解決すべき緊急の課題です。ここには当事者が関わることも多い(むしろもっと関わっていただきたい)ので、知っておいていただきたいことを述べたいと思います。
(6)3つのポイント
ニーズ把握や効果評価には、次のような専門的技術や能力が必要です。そのポイントは次の3点です
1.生活機能、特に「活動」についての評価能力。
2.生活機能モデルに立って、そのような「活動」の状況となっている因果関係を分析できること。
3.「活動」を向上させる、支援機器以外のさまざまな手段・技術を適応と禁忌を含めて知っていること。
特にこの2、3の点での技術・能力が十分でないことが、支援機器の開発過程で大きなマイナスを生じています。
(7)そのための条件
この3点の能力を高めるために必要なのは、次の2点です。
第一には、生活機能モデルのすべてにわたって、相互関係を整理しつつ把握し、分析的・総合的に見ることです。
第二には、生活機能のうち特に支援機器の効果を示す「活動」についての専門的な見方です。特に、一見「活動」を見ているようでも、実は「できる活動」(「活動」の「能力」)のみにとどまっていたり、より要素的な「模擬動作」しかみていなかったりして、もっとも重要な「している活動」(「実行状況」)把握が不十分なことがあります。
6 生活機能向上に向けたロボット開発・研究の緊急の課題
以下に、生活支援ロボット研究・開発のストラテジー確立に向けた緊急の課題を列挙します。
(1)生活機能向上に向けた理念の体系化
「理念」とは、たとえば「QOL」「ニーズ」、当事者の「自己決定権尊重」「安全性」などをどう理解するかについての明確な理論的立場を持つことです。この大枠はすでに確立されていますが、それをロボット研究・開発の観点から深め体系化することが今後の課題です。
(2)ニーズ把握に必要な知識・技術
「ニーズ」とはしばしば安易に使われていますが、実は正確に捉えるのが非常に難しいものです。ニーズ把握は直接当事者の意見や要望を聞いたり、専門家の意見を聞けばできるというような簡単なものではなく、専門的な知識や技術を必要とするものです。
そこにはまず、「ニーズ」とは何かという理論的検討と、それに立ったニーズ把握の方法論が必要なのであり、それについては筆者はこれまでも論じてきています7)。
(3)シーズとニーズのマッチング
ニーズを全面的かつ正確に把握した上でそれをシーズ(要素技術)とマッチさせるシステムの確立が必要です。
ここで考えなければならないのは、従来、一見当事者のニーズから出発するようでも、実は開発側が持っている何らかのシーズに対応するようなニーズを探しているのではないかと見られがちな傾向があったことです。
シーズから出発するアプローチ自体は全否定されるべきものではありませんが、これまでこのようなアプローチが効果的でなかったことも事実です。
今後、シーズが持つ可能性をうまく真のニーズ達成に結びつくようにマッチさせ、効果的な生活支援ロボットを作ることができる、シーズ側とニーズ側の協力体制の構築が大きな課題です。
(4)生活機能の実態把握の必要性
ニーズの把握はこれまで個別的な場合が多かったのですが、本当に必要なのは多数例における把握です。
これは、どのような生活機能の低下者がどれだけいるのか、生活機能の各レベル・各項目間がどのように関係し合っているのかなどの分析です。これによって正しいニーズが把握され、またシーズ側により適切なニーズの情報が提供されます。
筆者はこれまでICFに基づいた高齢者の生活機能実態調査(計約1万7千人)や、各種障害者の生活機能調査(約5千人)を行いました。これらがロボット研究・開発におけるニーズ把握に有効なことも少なくありません。さらに、今後は工学面への応用を意図してデザインした、できれば最初からロボット研究・開発を目的とした生活機能実態調査によってニーズを把握することが必要と考えられます。
(5)ロボットの効果評価の確立―特に適応と禁忌について
以上と関連するロボット研究・開発のもう一つの課題は、ロボットの効果の評価です。特に「人」への効果の観点からの体系化が緊急の課題です。
生活支援ロボットの効果とは、生活機能に対する影響の総和です。その際、開発の際に意図したプラスだけでなく、
1.メリット、デメリット(プラスとマイナス)の両方を、
2.短期的・長期的な効果の両面で評価する必要があります。
長期的デメリットとしては、特に「生活不活発病」と「生活機能低下の悪循環」5)6)を起こす危険性に留意し、それを避ける必要があります。
以上のような総合的な効果の検討に基づいて、
3.個々のロボットの「適応」(ロボットの使用が適する生活機能の状況)と「禁忌」(ロボットの使用が禁じられるべき生活機能の状況)を確定し、明示することが必要と考えられます。
おわりに
以上、生活支援ロボット開発の現状・課題・展望について、ICFの生活機能モデルの立場に立って「一対多」の生活機能向上のストラテジーを確立することの必要性について述べました。紙面の制約から説明不足の面もありますが、足りない点は文献で補っていただければ幸いです。
(おおかわやよい (独)国立長寿医療研究センター部長、(独)産業技術総合研究所客員研究員)
【引用文献】
1)松本吉央、西田佳史:日常生活を支援するロボットの実現に向けて、ESTRELA、No.01:7-14、2011
2)山内繁:iBOTの臨床試験をめぐって、日本生活支援工学会誌、11(2):3-9、2011
3)大川弥生:生活機能とは何か―ICF:国際生活機能分類の理解と活用、東京大学出版会、2007
4)大川弥生:介護保険サービスとリハビリテーション:ICFに立った自立の理念と技法、中央法規、2004
5)大川弥生:「よくする介護」を実践するためのICFの理解と活用:目標指向的介護に立って、中央法規出版、2009
6)大川弥生:新しいリハビリテーション;人間「復権」への挑戦、講談社現代新書、講談社、2004
7)大川弥生:「真のニーズ」の把握における生活機能モデル準拠の有効性:「一対一」の場面(対人サービス)と「一対多」の場面(機器開発)との区別と連関を考えつつ、国民生活研究、50(2):63-90、2010