「ノーマライゼーション 障害者の福祉」 2004年2月号
先端技術の福祉機器への応用
藤江正克
1 はじめに
ロボット工学には夢があり、パーソナルロボット・マイロボットなど長らく実用化が期待されながらその期待に応えられなかった。このような状況が長く続いたのは二つの理由があったと考えられる。まず、実現できるロボットに対して真の社会ニーズ(マーケットと言ったほうが正しいかもしれない)がなかったのであろう。次に、周辺技術や社会インフラ整備が、ロボットが活躍するには不十分であった。ロボットが人間のパートナーとして有効に働けるためには社会システムの一部にうまく組み込まれなければならない。
21世紀になって、特に先進各国の社会でこの二つの準備が整ってきたのだと思われる。少子高齢化の加速を受け、あらゆる分野から人間の良きパートナーとしての“本当のロボット”が強く求められている。その中で、急速な高齢社会の進展に対応するために、現在、先進国の共通課題として高齢者の生活を支援する技術の取り組みが強力に進められている。特に、高齢者の増加は介助者人口の相対的な減少も意味しており、高齢者や障害者の自立生活を支援するための機器開発が急務となっている。このため、寝たきりの人や車いす使用者は無論のこと、その可能性のある方も含めて、できるだけ他人に頼らず自立した生きがいのある人生が送れ、その結果として活力ある21世紀の社会が期待されており、高齢者や障害者の自立や社会参加を促進する福祉機器や健康な人生を全うすることを支援する機器を開発することが重要なのである。
高齢社会では「健康」を実現するための産業が有望と考えられる。高齢者の増加というマーケットにより、21世紀福祉ロボットがやっと社会から求められ始めたことから、日本の新たな産業としての期待も大きい。
これに対して、ロボット側にもようやくそのニーズの一部対応できるシーズがそろいつつある。1980年代前半に開発したマスマートマニピュレータは15年ほど経て製品となり、1997年に続いて2000年にはスペースシャトル・ディスカバリに搭載され、若田宇宙飛行士が操縦した宇宙マニピュレータになった。これは2006年の国際宇宙ステーション日本モジュールきぼうにも搭載の予定である。機能開発から実用化性能を得るまでの時間が想像できる例である。このように、現在実用化が始まっているロボットの基本機能は1985年代までに研究開発が行われてきたものが多い。
現在最も有望なロボットとして社会から注目されている福祉ロボットは、この宇宙用のマニピュレータと同様に、人間とロボットが高度な信頼関係で協調して働くシステムでなければならない。すなわち、いずれも人間が主役でロボットが人間の行動に合わせながら人間を支援できるようにするのである。このようなロボットには、本質安全のための技術・社会制度を装備する必要があり、この視点からの展望も必須である。
人間はだれでも加齢に伴い肉体的能力の低下が避けられない。しかしながらこのような加齢に伴う肉体的能力の変化は自然なことであり、福祉機器はこの変化を前提に支援する機器であることが望ましい。ロボット技術のような先端技術を生活に活かすにはこのような視点が不可欠であり、いくつかのロボットの例を示しながら、工学的な視点から、先端技術の福祉機器への応用の現状や課題、今後の展望などについて述べる。
2 歩行訓練ロボット
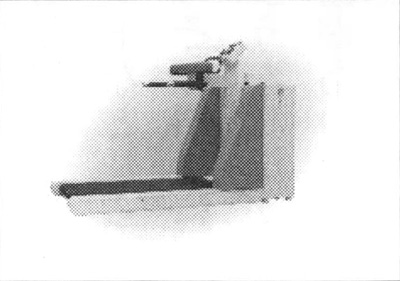
歩行訓練ロボットにVR(仮想現実感)を導入した例を図1に示す。トレッドミル上のリハビリテーションにおいて、あたかも屋外で歩行しているかのような状況を実現することは、実際の環境での歩行が難しい使用者にとって非常に意義深い。図2は歩行訓練ロボットを軽量小型にした改良機である。リハビリテーション環境には、必ずしも広い場所が確保できる訳ではないので高性能な機能を搭載しつつ、低価格で見た目にシンプルに見える小型のロボットが普及には欠かせない。
図1 VR訓練
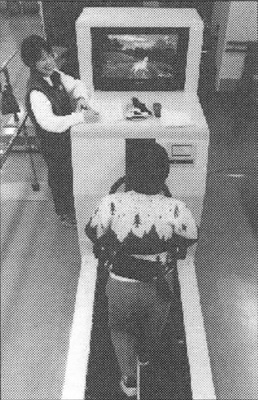
図2 小型コンパクト歩行訓練ロボット
3 歩行支援ロボット
VRを導入した歩行支援ロボットでのリハビリであっても仮想環境である。やはり実際の歩行環境でのリハビリができるに越したことはない。
図3に示すのは、このような環境での歩行のリハビリに効果が得られた歩行支援ロボットである。このようなロボットにはこれまで研究されてきた自律移動ロボット機能がロボット本体に効果的であることはもちろんであるが、さらに使用者の歩行状況やリハビリの効果を定量的に得るためにモーションキャプチャ技術が有効である。モーションキャプチャ技術とは、さまざまな環境での運動状況をコンピュータ内部に正確・柔軟に取り込む技術であり、近年映画やアニメに広く活用されてきている。
図3 歩行支援ロボット

4 外出支援ロボット
一人で外出ができることは、社会との連携を確保して社会的に自立する意味から重要であるが、歩行環境は必ずしもロボットに適した状況にはない。図4に示したのは、このような本人にとっても家族にとっても安心な外出を支援するロボットである。
図4 外出支援ロボット
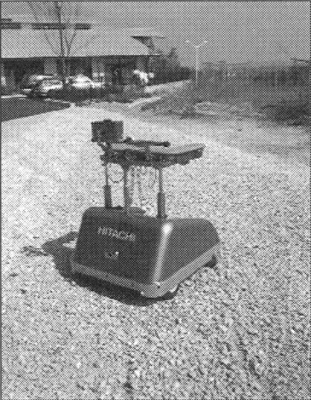
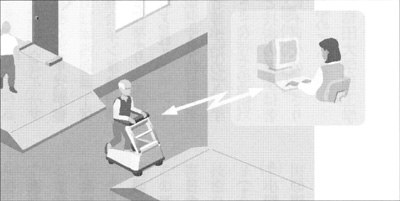
図5に示すようにロボットと家族は情報でしっかりと結ばれており、ロボットがどこにいるかといった情報も常時モニタリングすることが可能である。すなわちGPSやネットワークが有効であるが、ロボットが日本中のどこからでも安価に利用できる社会インフラはすでに整備されているので、このロボットにも搭載されている。このような社会インフラはすでに他の目的に普及したものを活用しているが、盲人用のガイダンス用ICタグや、車いす用の軽量な燃料電池なども移動ロボットの研究対象として積極的な取り組みが始まっている。
図5 外出支援システムイメージ
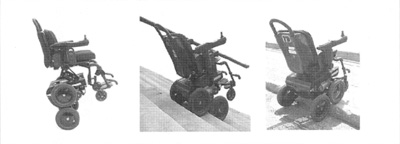
前述したように、屋外の移動環境はバリアフリー化は進められているが、ロボットが自由に移動するために必ずしも十分とは言えない。このような視点から電動車いすが階段や段差をも踏破できるとともに、車いすであっても使用者が立位の視線で移動できる機構と制御を実現したロボットが、すでに米国FDAの認可も得て商品化されている。図6にその写真を示す。
図6 立位走行・階段段差踏破移動ロボットiBOT
5 生活支援ロボット
高齢者は日々身体状況が大きく変化するとともに、加齢に伴って歩行能力が減少することは止むを得ない。このような使用者の身体能力の変化に応じて支援能力を自律的に制御できる日常生活支援ロボットも発表されている。図7にその写真を示す。
図7 生活支援ロボット

6 まとめ
21世紀になり、ようやくシーズが整った福祉ロボットたちは本当のニーズに巡り合い、周辺の社会インフラの整備にも助けられることにより「本物」になり始めたように感じられる。
このような人を対象とする福祉ロボットの研究開発を筆者等が始めて、すでに10年以上経験してきた。その間の、社会ニーズの高まりと技術の進歩は著しく、福祉ロボットに不可欠の「さりげない動作」を実現し始めている。
(ふじえまさかつ 早稲田大学理工学部教授)
【参考文献】
(1)藤江:展望『超高齢・少子化社会生活に支援してくれるロボット・メカトロ機器』、日本機械学会誌、Vol.100、No.944、pp.750―754、(1997―7)
(2)藤江他:歩行訓練装置の実用化、1997年度精密工学会春季大会学術講演会講演論文集(1)、pp.457-458、(1997―3)
(3)柄川、藤江他:歩行支援装置の傾斜面対応パワーアシスト制御、1998年度精密工学会春季大会学術講演会講演論文集M68、pp.613、(1998―3)
(4)酒井、藤江他:歩行訓練機の訓練データおよび訓練映像の評価、第16回日本ロボット学会学術講演会論文集2P13、Vol.2、pp.925―926、(1998―9)
(5)小関、藤江他:小型軽量歩行支援機の開発、第19回日本ロボット学会学術講演会論文集1M32、pp.453-454、(2001―9)
(6)竹内、藤江他:高齢者用生活支援パワーアシストシステム、第17回ライフサポート学会大会講演会予稿集、pp.31、(2001―8)
(7)藤江他:次世代ロボットシステム実用化のための技術課題および社会環境整備等に関する調査研究報告書、(財)機械システム協会、2003―6。
(8)マベリックトランスナショナル社 Independence Technology L.L.CHP