「ノーマライゼーション 障害者の福祉」 2015年4月号
福祉用ロボットの開発と普及の動向
比留川博久
1 はじめに
わが国では少子高齢化が急速に進み、要介護者が増加し、介護者は不足するという状況に陥りつつある。そうした社会状況の中で、人手不足解消のために介護ロボットを導入すると考えるのは自然な発想であるが、現実はそう単純ではない。介護ロボットというと、ロボットが単独で介護をやってくれるイメージがあるかもしれないが、安全性や自律性が不足しているために現状では難しい。可能なのは、介護者の負担軽減のために介護者を支援するロボット、被介護者の自立性向上あるいは維持を支援するロボットである。この位置づけを明確にするため、我々は介護ロボットではなくロボット介護機器という用語を用いることとしている。
ロボット介護機器や障害者の福祉用具に共通する特徴は、ユーザーとなる人に密着して利用される点である。産業用ロボットでは、ロボットと人の働く空間を隔離することにより安全を確保してきたが、ロボットが人に密着しているのでこの方法は使えない。別の方法で安全性を担保する必要がある。本稿では、生活支援ロボットの安全性を実現する方法について紹介する。
ロボットの安全性と並んで重要なのは、ロボットの有用性である。人間の生活、介護業務のフロー、従来の考え方等と整合性を取らないと、真に役立つロボット機器を創るのは難しい。
WHOは、2001年にICF(International Classification of Functioning, Disability and Health)という生活機能分類を定めているが、我々はこの考え方に沿って、ロボット介護機器の開発コンセプトを明確にする方法について開発を進めている。本稿でその概要を紹介する。
個人で使ってもらうにせよ、業務で使ってもらうにせよ、最終的にはコストが問題になる。実現された安全性と有用性と、コストが見合うかどうかである。本稿では、ロボット介護機器を題材として、ケーススタディを試みる。
2 ロボットの安全性
ロボットを含む機械の安全を実現する一つの方法として、ISO12100は三段階法というものを規定している。第一段階では、本質的安全設計方策によりリスクを低減する。たとえば、モータの出力を可能な限り弱め、最悪の場合に暴走したとしても大きな危害を発生しなくするようにする方法である。しかしながら、たとえばベッドから車椅子への移乗を支援する機器を考えると、人の体重を持ち上げるだけの出力は必要となる。第二段階では、安全防御によるリスク低減をする。たとえば、センサにより異常状態を検知して、モータの電源を落とす等の方策を導入する。第三段階では、使用上の情報によるリスクの低減を行う。たとえば、マニュアルで運用規則を定める、使用前に導入講習を実施する等である。第三段階より第二段階、第二段階より第一段階を優先して安全を確保しないといけない。それでも絶対安全な機械というものは作れない。これを残留リスクと呼ぶ。機械が安全であるというのは、許容できないリスクがないことと定義される。
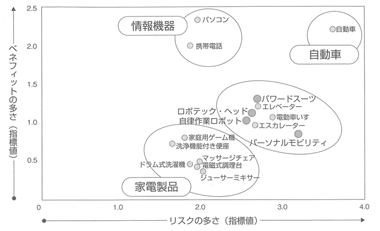
では、どの程度のリスクは許容できるのであろうか。これはその機械のベネフィットに依存する。たとえば自動車は多くの致死事故を発生させているが、ベネフィットが多いので社会は許容している。家電製品はローベネフィットであるがローリスクである。これらの関係について、消費者の意識調査をした結果を図1に示す。ロボットは中程度のベネフィットとリスクを持つと評価されている。
図1 リスクとベネフィットに関する意識調査(産業技術総合研究所)
 (拡大図・テキスト)
(拡大図・テキスト)
経済産業省は、平成21年度から5年間、NEDO生活支援ロボット実用化プロジェクト(プロジェクトリーダー、比留川博久)を実施し、生活支援ロボットの対人安全性基準、安全試験方法および認証方法の確立を目指した。その成果として、平成26年2月1日に、生活支援ロボットの安全性規格であるISO13482が正式発行した。この安全規格に準拠するための安全試験方法も開発し、産業技術総合研究所に必要な試験をワンストップで実施できる「生活支援ロボット安全検証センター」を整備した。安全検証センターの概要を図2に示す。
図2 生活支援ロボット安全検証センター
(1)走行試験関連エリア
(2)対人試験関連エリア
(3)強度試験関連エリア
(4)EMC試験関連エリア
- 多目的走行性試験路
- 傾斜走行性試験路
- 環境認識性能試験装置
- ロボット走行状態模擬装置
- 3次元動作解析装置
- 障害物接近再現装置
- 衝突安全性試験機
- 静的安定性試験装置
- ダミー校正装置
- 複合環境振動試験機
- 衝撃耐久性試験機
- 耐荷重試験機
- 装着型生活支援ロボット耐久試験機
- ベルト型走行耐久性能試験機
- ドラム型走行耐久性能試験機
- 重心移動制御装置
- 装着型生活支援ロボット強度試験機
- 電波暗室
平成26年2月には、パナソニックのリショーネ(ベッドが車椅子に変形することにより移乗を支援する機械)に対して、世界初となるISO13482に準拠していることを示す認証を発行し、これまでに5機種のロボットに対して安全認証を行なった。以上述べた成果により、生活支援ロボットの安全規格・安全試験方法・安全認証方法は整備されたと考えている。
3 ロボットの有用性
ICFに基づいてロボットの有用性を表現することについて、基本的な考え方については、すでに本誌において大川弥生氏によって解説されている1)ので、そちらをご参照いただきたい。
経済産業省は、平成25年度から5年計画でロボット介護機器開発・導入促進事業2)を実施中である。この中で、産業技術総合研究所を代表とする公的機関のグループは基準策定・評価事業を受託し、ロボット介護機器の有用性・安全性に関する基準作成とロボット介護機器の開発補助事業者の評価を行なっている。有用性の評価については、ICFに基づく開発コンセプトシートを作成し、開発機器の1日の生活の中での目標(被介護者、介護者)、目標とする活動(被介護者、介護者)、使用する環境(場所、時、者、人)、機器を利用することにより起こりうるマイナスとその対処法(被介護者、介護者)、機器の適用と禁忌等について検証を行なっている。
プロジェクト開始当初は開発事業者に戸惑いと混乱が散見されたが、プロジェクト開始から2年近くが経過し、開発サイクルを回すにつれてコンセプトは浸透しつつあり、適切な記述の割合が増加してきている。特に、要介護者を対象とする場合、その心身状態は千差万別で、事前に慎重に検討しないと、極少数のみが適用になってしまう。たとえば、移乗支援機械を考えると、座位が保持できるかどうか、膝折れしないかどうか、脚の筋力はどのくらい等のさまざまな要因によって適用が限定される。誰にでも適用となる機械は作れないので、この段階の検討が非常に重要である。
ロボット介護機器の開発分野としては、平成25年度に介護施設を対象として、装着型移乗介助(介護者のパワーアシストを行う装着型の機器)、非装着型移乗介助(介護者のパワーアシストを行う非装着型の機器)、屋外移動支援(高齢者等の外出をサポートし、荷物等を安全に運搬できる歩行支援機器)、認知症の方の見守り(センサや外部通信機能を備えた見守り機器)、排泄支援(排泄物処理の行える設置位置の調整可能なトイレ)の5分野の開発を開始した3)。平成26年度には、在宅介護を対象として、屋内移動支援(屋内移動や立ち座りをサポートする機器)、見守り(外部通信機能を備えた転倒や浴槽での異常を検知する機器)、入浴支援(在宅の浴槽の出入り動作を支援する機器)を追加した。
プロジェクトの実施方式としては、各重点分野に複数の開発者を採択して開発競争をしてもらい、各年度末にステージゲート審査を行なって優れた事業者を残していくという方式を採用している。26年度は53社が参加中で、中小企業も多く含まれている。平成25年度に開始した分野の中、屋外移動支援分野と認知症の方の見守り分野は2年計画で、26年度で開発を終了する。屋外移動支援分野の成果機器の一つが、電動歩行アシストカート(RT.ワークス(株))である。これは、上り坂ではパワーアシストをして楽に登坂でき、下り坂ではブレーキをかけて転がり落ちるのを防ぐ機器である。また、移動軌跡も記録できる機能があり、被介護者の活動のアクティビティを評価することに利用可能である。
認知症の方の見守りについても、ベッドからの起き上がり、ベッドでの端座位、ベッド上での起立、離床等が低失報率・低誤報率で検出できる機器が開発された。従来はマット等の接触センサを利用する方法が主流であったが、成果機器では3次元距離センサ等を用いた方式が多い。今後は、プライバシーに対する心理的抵抗、センサのコスト等の問題に対応できれば、実用化が進むものと期待している。
非装着型移乗支援機器の開発は、まだまだ乗り越えるべき課題が多い。移乗に要する時間、移乗の際の安全性、被介護者への負担、機器の大きさ、コスト等に課題が残る。在宅用を想定して開発中の屋内移動支援機器についても、移乗支援機器と共通した課題として、立ち上がり・立ち座りの支援を被介護者への負担を小さく安全に行う方法の模索を行なっているところである。在宅の見守りでは、浴室、特に浴槽の見守りが難しい。湯気があるためレーザーを使う機器の適用が困難なこと、重篤な事故が多いために高い信頼性が要求されることが課題である。現在、さまざまなセンサを用いた方式が模索されているところである。
4 普及に向けて
福祉用ロボットの実用化のため、有用性と安全性が重要であることはすでに述べた。これらに加えて、普及のためには次のような課題があると考えられる。
- (コストダウン)前述したロボット介護機器の開発プロジェクトでは、個別に使う機器は10万円程度、施設で共用できる機器については数十万円程度を目標価格としている。普及のためには、さらなるコストダウンが必要である。
- (意識改革)介護用リフトの国内普及率は8%程度であるが、普及を阻害している理由は移乗に時間がかかることに加えて、介護は人がやるものであるという介護現場の強い意思があると伺っている。一方で、多くの介護者が腰痛を抱えている。また、拘縮等の症状がある被介護者の場合、リフトを利用した方が被介護者の負担が少ないという報告もある。従来のやり方の問題点を改めて見直し、新しい業務方式を試すといった現場の意識改革が必要であろう。
- (制度改革)医療分野では、医療機器承認・認証の早期化。たとえば、FDAのDe Novo申請のように、治験なしに申請を認める、審査期間の明確化。介護分野では、ロボットを利用した場合の介護士比率制限の緩和、介護保険の要介護度ごとの支払い限度額体系を選択可能な制度の導入、介護保険福祉用具補助申請を毎年実施する等が望ましい。
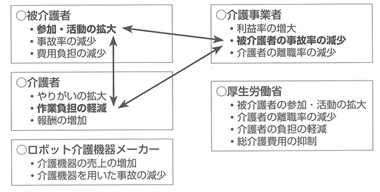
ここで、ロボット介護機器を対象として、普及のためのケーススタディを試みる。ロボット介護機器のステークホルダーとしては、被介護者、介護者、ロボット介護機器メーカー、介護事業者、厚生労働省(行政)が挙げられる。それぞれのステークホルダーの利益と、労力面で考えた利益相反関係を図3に示す。
図3 ロボット介護機器のステークホルダーと利益相反関係
 (拡大図・テキスト)
(拡大図・テキスト)
被介護者の参加・活動を拡大させるためには、介護者がその活動を見守る必要がある。たとえば、歩行機能が衰えた人が廊下を歩く場面を考えると、転倒を防止するために傍らに寄り添って歩く必要があり、介護者の作業負担は増える。また、介護事業者から見ると、転倒による事故のリスクは増大する。これらのステークホルダー間の利益は相反するのである。
現在の介護を考えると、歩行機能が衰えてくると転倒リスクを下げるために車椅子に乗せて移動させる場合が多い。この介護方法だと、被介護者の参加・活動は縮小し、介護者の作業負担は軽減され、介護事業者から見た事故リスクも軽減される。また、歩かないと廃用症候群により要介護度が上がっていくので介護保険収入も増える。逆に、行政側から見ると、総介護費用が増大する。介護保険総費用は、2000年の制度発足時には3.6兆円程度であったが、現在は8兆円を超えたらしい。
では、どういう介護を目指すべきであろうか。一つの仮説は、次のようなものである。
- (労力面)被介護者の参加・活動の拡大および事故率の減少が、介護者の負担を軽減しつつ実現すること。
- (費用面)業務の効率化が、対応する人件費より安価に実現すること。
もしも、これらの目標がロボット介護機器の導入により実現すれば、被介護者の参加・活動は拡大し、介護者の負担は軽減し、ロボット介護機器メーカーは介護機器を販売することができ、行政側から見ても要介護度が上がらないので総介護費用が抑制できる。
逆に、介護事業者から見ると収入が減少してしまうが、このような「よくする介護」が実現できればサービスの質の向上に繋がり、サービスの利用率が高まって利益率は高くなる可能性がある。また、要介護度をキープできれば、介護保険からインセンティブを支給するようにすれば、介護保険収入の減少も抑制可能であろう。
以上述べたとおり、福祉用ロボットを普及させるためには、有用性・安全性・コストダウンに加えて、関係するすべてのステークホルダーの利益になるように考える必要がある。
5 おわりに
本稿では、福祉用ロボットの中、主として介護用ロボットに関して解説したが、障害者用ロボットでも共通の課題がある。障害者用ロボットの場合は、これら共通の課題に加えて、利用者の数が多くなく、ロボット事業者側から見ると収益事業になりにくいという問題が加わる。この点については、公的な支援に加えて、ユニバーサルデザインや高齢者用と共用する等、適用範囲を拡大する工夫が必要であろう。また、最近は3Dプリンタも低価格化し、個人用の機器を個人が開発することも技術的には可能になりつつある。今後の発展に期待したい。
(ひるかわひろひさ (独)産業技術総合研究所知能システム研究部門長)
【参考文献】
1)大川弥生、生活支援ロボット開発の現状・課題・展望、ノーマライゼーション、第33巻、第4号、pp.10-15、2013年
2)北島明文、ロボット介護機器開発・導入促進事業について、ノーマライゼーション、第33巻、第4号、pp.16-19、2013年
3)五島清国、福祉用具・介護ロボット実用化支援事業を通して、ノーマライゼーション、第33巻、第4号、pp.20-25、2013年